




1. 前期回顾
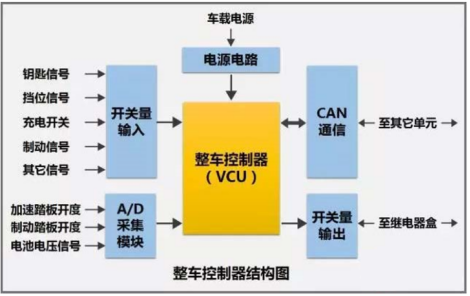
在电动汽车中,整车控制器VCU是核心控制部件,是电动汽车各个子系统的调控中心,协调管理整车的运行状态,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。此外,可通过行车充电和制动能量的回收等实现较高的能量效率。整车控制器结构图如下图所示:
上一章节,我们简要讲述了整车控制器功能开发过程中自动泊车控制功能管理的一般需求及实现方法,本章节,我们简要介绍整车控制器功能开发的跛行控制功能。
纯电动汽车在出现动力电池电量过低或温度较低、动力电池或驱动电机等动力系统部件温度过高的故障、或是加速踏板开度电压值的故障、以及制动压力电压值的故障、或其他一些影响车辆正常安全行驶的故障时,限制动力电池输出功率及驱动电机输出转矩,控制车辆行驶车速在一定的安全范围之内,使驾驶员能够在一定的时间或距离内,做出相应的处理措施。
2. 功能描述
整车出现油门踏板故障、制动系统故障及转向系统等相关故障时,由于该故障并不影响行车,如果贸然下高压,就会造成交通拥堵以及需要请拖车造成客户不必要的支麻烦,所以定义该故障的处理方式为整车进入跛行,可以让车辆以很低的车速行驶到路边或开到维修点。
车辆进入跛行模式后, VCU控制车速不超过设定车速值,控制MCU输出功率不超过最大功率的50%,此模式下若无油门踏板故障,在车速小于设定车速值时,车辆响应油门踏板开度进行行车,若油门踏板有故障,则VCU自动控制车速稳定在设定车速值附近,此时制动优先依旧需要保证。
3. 功能接口
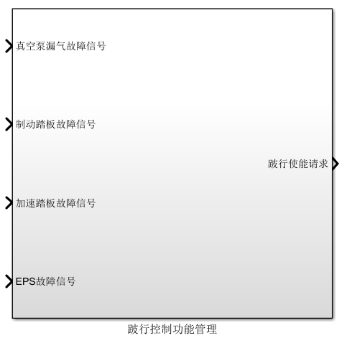
跛行控制功能模型输入和输出接口参数,如下表所示:

4. 功能实现
跛行控制功能管理模型简化示意图,如下图所示:
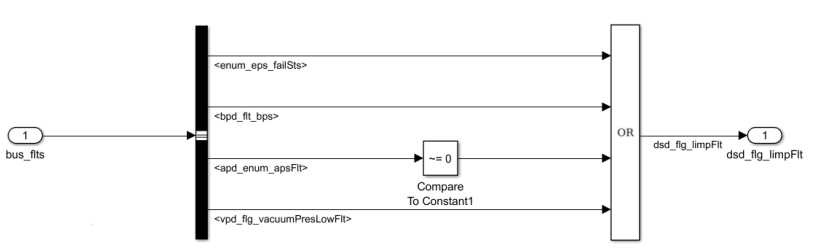
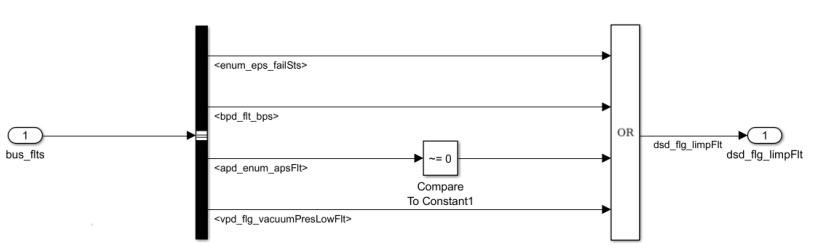
跛行控制功能管理模块部分算法如下图所示:
5. 后期展望
本章节简要描述了整车控制器功能开发过程中跛行控制功能管理的一般需求及实现方法,下一章节,将介绍整车控制器功能开发的最高车速管理功能,敬请期待。




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















