



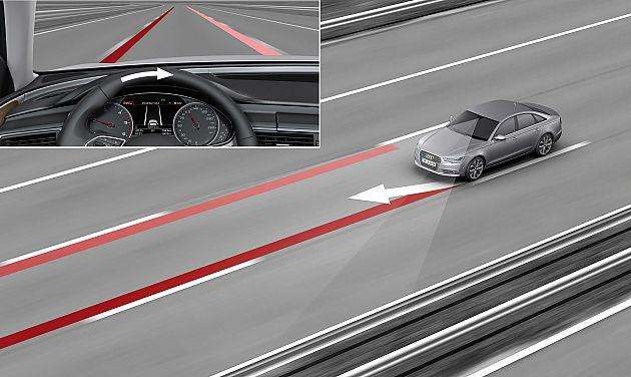

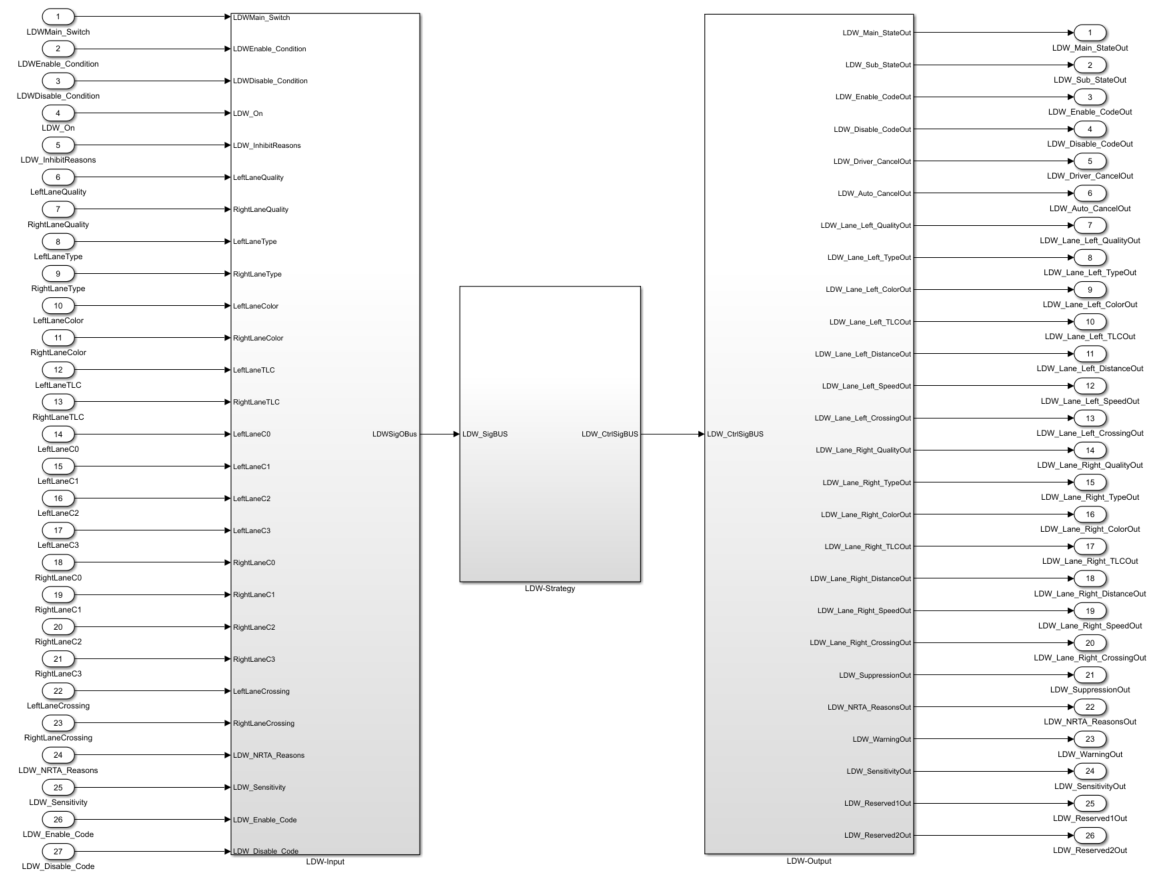
LDW模块即为车道偏离报警控制算法模块,本模块为Simulink模型,模型框架共包括输入模块、决策模块和输出模块等三个子模块。输入模块中主要包括本车信息和视觉传感器提供的道路信息等内容;决策模块中根据本车信息和视觉传感器提供的信息来决策车辆是否处于偏离状态,最终给出报警决策;输出模块中将对LDW模块的状态、报警决策状态等信号进行输出处理,在调试过程中还可以进行标定。附件中是该功能模块的源代码,与此同时,可点开此链接了解LDW子系统的功能规范说明:智能辅助驾驶系统之LDW(1);智能辅助驾驶系统之LDW(2)。
.png)


 回到顶部
回到顶部




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 下载
下载
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接

















