



HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,减少了实车路试的次数,缩短开发时间和降低成本的同时提高ECU的软件质量,降低汽车厂的风险。
在新能源汽车这个全新的领域中,HiL硬件在环仿真测试对于三大核心电控系统:整车控制系统、BMS电池管理系统、MCU电机控制器是非常重要的。但其高精度的实时性要求、大电压大电流的安全性、信号接口的特殊属性、以及系统的可扩展性都使得传统汽车电控系统的HiL硬件在环仿真测试系统无法解决。
在讲解HIL系统组成之前,除了区分MIL,SIL的概念,还应该区分以下三种形式:
①虚拟控制器+虚拟对象=动态仿真系统,是纯粹的系统仿真;
②虚拟控制器+实际对象=快速控制原型(RCP)仿真系统,是系统的一种半实物仿真;
③实际控制器+虚拟对象=硬件在回路(HiL)仿真系统,是系统的另一种半实物仿真 。
从以上分析可以看出半实物仿真是包含硬件在环的,我们文章中所说的一般是第三种,第二种一般在车企基本不会进行该环节,在航空航天领域可能会进行RCP仿真验证。
HiL系统主要由三部分组成:硬件平台、实验管理软件和实时软件模型。
硬件平台就是实际和被测ECU进行物理交互的硬件,主要包括外围模拟,IO,通讯信号的生成和采集。
实时软件模型是运行在实时目标机上的代码程序,其主要用于数字化模拟被测ECU外围的各种执行机构和感知机构等的物理特性。
实验管理软件是将实时软件模型生成的模拟数据与硬件平台进行组合管理的工具。
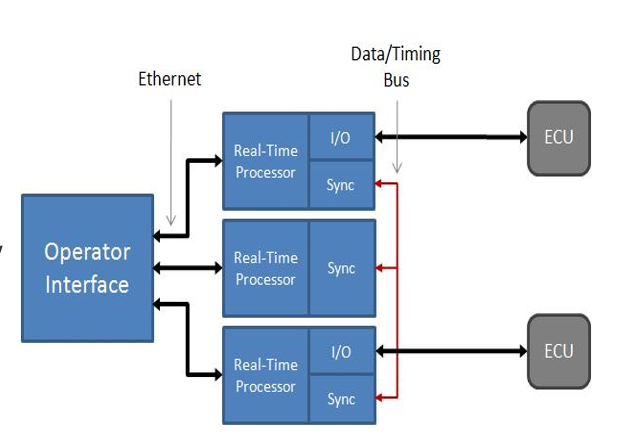
下面通过图片的方式为大家明确:
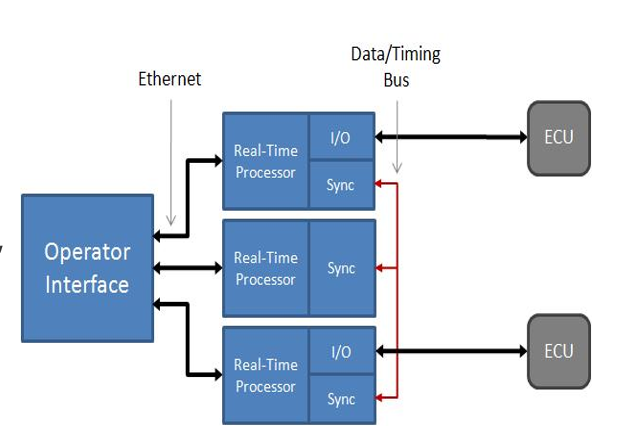
如图所示,Operator Interface即所谓的实验管理软件界面(上位机界面),其运行于普通PC中。
Real-Time Processor是一个实时处理器,运行实时系统,在实时系统中运行的实验管理软件执行内核,实时软件模型就是通过该执行内核运行于实时处理器中,并接受其调度。
这里说明一下:普通PC和Real-Time Processor(也成为实时下位机或目标机)通过网线连接,达到PC中实验管理软件界面和实验管理软件执行内核交互。
IO和Sync就是实际和被测ECU交互的硬件接口,其接受实验管理软件执行内核的调度。



 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















