



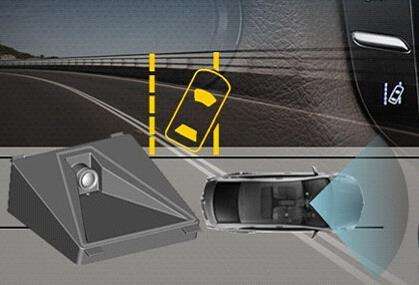
前文介绍了LDW系统描述、信号接口等内容,本文将继续介绍LDW系统控制逻辑相关内容。

LDW逻辑状态示意图
OFF State:
OFF状态是当主开关处于关断状态时所属的状态,也是上电时的默认状态。
OFF状态进入条件:1、上电初始化;2、从STANDBY进入-->用户关闭主开关;3、从ACTIVE进入-->用户关闭主开关;4、从FAILURE进入-->用户关闭主开关。
OFF状态执行动作:系统故障检测。
STANDBY State:
STANDBY状态是当用户打开主开关之后,系统检查当前工作条件是否满足的状态。
STANDBY状态进入条件:1、从OFF进入-->用户打开主开关;2、从ACTIVE进入-->LDW工作条件不满足;3、从FAILURE进入-->Failure条件解除。
STANDBY状态执行动作:1、系统故障检测;2、检查LDW的工作条件是否满足;3、在LDW工作条件不满足时抑制状态跳转进入AVTIVE。
ACTIVE State:
ACTIVE状态是LDW执行车辆偏离行为监控和报警的工作状态,该状态包含4种子状态:No Warning,Left Warning,Right Warning,Suppress Warning和Stop Warning。
ACTIVE状态进入条件:从STANDBY进入-->LDW的工作条件全部满足。
ACTIVE状态执行动作:1、系统故障检测;2、车道线识别;3、检测和预测车辆在车道内的位置;4、检测报警抑制条件;5、检测报警中止条件;6、在报警条件满足时发出报警;7、在抑制条件满足时抑制报警;8、在中止条件满足时中止报警。
ACTIVE Sub-state:No Warning:
No Warning子状态是ACTIVE状态的默认状态,此时算法可以确定车辆在车道中的位置,并且准备好发出报警。
No Warning子状态进入条件:1、从Left Warning进入-->左侧偏离报警结束或左侧偏离报警持续时间达到最长报警时间(默认2s);2、从Right Warning进入-->左侧偏离报警结束或左侧偏离报警持续时间达到最长报警时间(默认2s);3、从Suppress Warning进入-->当前工作条件不再满足抑制条件且超过相应抑制条件所需的冷却时间;4、从Stop Warning进入-->当前工作条件不再满足中止条件且超过相应中止条件所需的冷却时间。
No Warning子状态执行动作:1、车道线识别;2、检测和预测车辆在车道内的位置;3、检测报警抑制条件;4、检测报警中止条件。
ACTIVE Sub-state:Left Warning:
Left Warning子状态是ACTIVE状态的报警状态之一,此时车辆状态满足LDW左侧报警条件,系统发出左侧偏离报警。
Left Warning子状态进入条件:从No Warning进入-->左侧偏离报警条件满足and无报警抑制and无报警中止。
Left Warning子状态执行动作:1、车道线识别;2、检测和预测车辆在车道内的位置;3、发出左侧偏离预警;4、检测报警中止条件。
ACTIVE Sub-state:Right Warning:
Right Warning子状态是ACTIVE状态的报警状态之一,此时车辆状态满足LDW右侧报警条件,系统发出右侧偏离报警。
Right Warning子状态进入条件:从No Warning进入-->右侧偏离报警条件满足and无报警抑制and无报警中止。
Right Warning子状态执行动作:1、车道线识别;2、检测和预测车辆在车道内的位置;3、发出右侧偏离预警;4、检测报警中止条件。
ACTIVE Sub-state:Suppress Warning:
Suppress Warning子状态是ACTIVE状态的不允许发出报警的状态之一,此时车辆状态满足抑制报警条件,系统不能发出报警。
Suppress Warning子状态进入条件:从No Warning进入-->报警抑制条件满足。
Suppress Warning子状态执行动作:1、车道线识别;2、检测和预测车辆在车道内的位置;3、检测报警抑制条件;4、在抑制条件满足时抑制尚未发出的报警。
ACTIVE Sub-state:Stop Warning:
Stop Warning子状态是ACTIVE状态的不允许发出报警的状态之一,此时车辆状态满足中止报警条件,系统不能发出报警。
Stop Warning子状态进入条件:1、从Left Warning进入-->报警中止条件满足;2、从Right Warning进入-->报警中止条件满足。
Stop Warning子状态执行动作:1、车道线识别;2、检测和预测车辆在车道内的位置;3、检测报警中止条件;4、在中止条件满足时中止已经发出的报警。
FAILURE State:
FAILURE状态是LDW的故障处理状态,当检测到系统故障时进入该状态进行故障处理。
FAILURE状态进入条件:1、从OFF进入-->LDW系统检测到内部故障;2、从STANDBY进入-->LDW系统检测到内部故障;3、从ACTIVE进入-->LDW系统检测到内部故障。
FAILURE状态执行动作:1、系统故障检测;2、系统故障处理。
智能驾驶辅助驾驶系统之LDW(1)、(2)介绍了LDW系统描述、信号接口、控制逻辑等相关内容,以供读者参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















