




1. 毫米波雷达
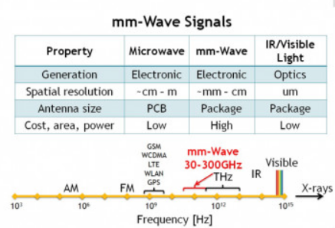
毫米波雷达是指长度在1~10mm,工作频率在30~300 GHz的电磁波。通过发射电磁波对目标进行照射并接收其反射波及回波,经过对比处理,由此获得目标的距离、速度、方位、高度等信息。
毫米波雷达的探测距离一般在150m-250m之间,有的高性能毫米波雷达探测距离能达到300m,可以满足汽车在高速运动时探测较大范围的需求。毫米波雷达的探测精度较高。
2. 毫米波雷达的特性
优点:
1)可以在小的天线孔径下得到窄波束,方向性好,有极高的空间分辨力,跟踪精度较高;
2)较宽的工作频带:频带极宽,适用于各种宽带信号处理;
3)有较宽的多普勒宽带,多普勒效应明显,具有良好的多普勒分辨力,测速精度较高;
4)地面杂波和多径效应影响小,低空跟踪性能好;
5)毫米波散射特性对目标形状的细节敏感,因而可提高多目标分辨对目标识别的能力与成像质量;
6)毫米波与激光和红外相比,虽然它没有后者的分辨率高,但它具有穿透烟、灰尘和雾的能力,可全天候工作。
缺点
毫米波雷达的缺点主要是受大气衰减和吸收的影响;空间的毫米波传播特性表明,水分子等对毫米波的传播具有较高的吸收性,不利于毫米波,特别是短毫米波的传播。因此毫米波雷达在高潮湿环境下探测精度较差。同时受到频段损耗的直接制约,无法感知行人。
3. 毫米波雷达工作原理
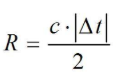
测距:通过给目标连续发送毫米波信号,然后用传感器接收从物体返回的毫米波,通过探测毫米波的飞行(往返)时间来得到目标物距离。
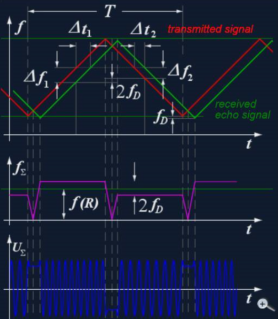
毫米波雷达通过天线向外发射调频连续波(三角波),反射波与发射波形状相同:存在一个时间差△t,还包括一个多普勒频移 fd。根据距离公式,求出相距目标的距离:
测速:根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量。根据多普勒原理,求出相对目标的相对速度:
测方位角:通过并列的接收天线收到同一目标反射的雷达波的相位差计算得到目标的方位角;角度测量是探测“目标与天线中心线的连线”与法线的夹角,用于目标定位,从而获得目标与本车位置信息。
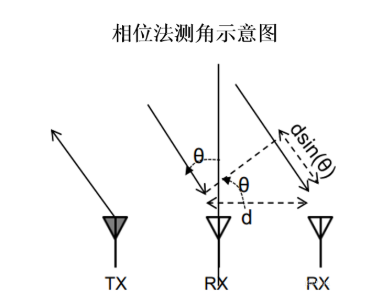
毫米波雷达测角原理图如上图所示。其中接收天线之间相隔距离为d,造成回波信号一前一后的到达接收天线,导致两根天线同时接收到的信号在相位上相差一个 Δφ,θ 为待测角度, 经计算得出:
4. 毫米波雷达的应用
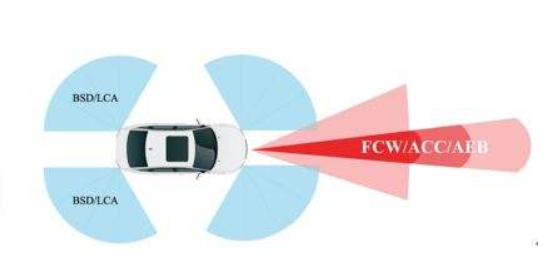
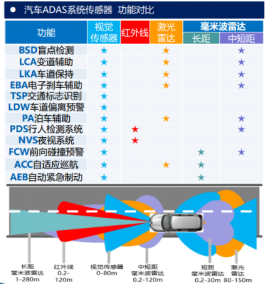
车载毫米波雷达按照频率可分为两种:24GHz毫米波雷达和77GHz毫米波雷达。车载24 GHz雷达主要是用于100 m以内的中短距离探测功能, 如变道辅助LCA、盲点检测BSD,车道保持LKA等。77GHz毫米波雷达则主要用于实现自适应巡航系统ACC,自动紧急制动AEB。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















