





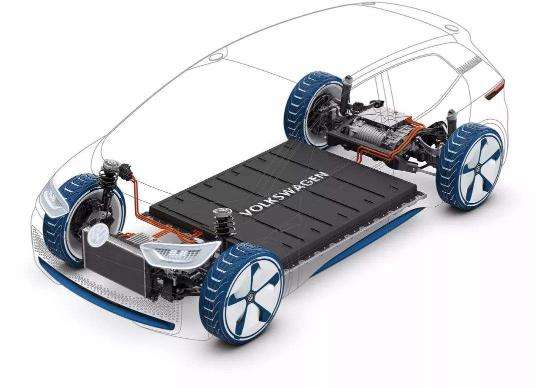
与传统汽车电子电气分散架构不同,特斯拉采取了集中式的电子电气架构,即通过自主研发底层操作系统,并使用中央处理器对不同的域处理器和ECU进行统一管理。特斯拉Model3的电子电气架构核心控制器主要包括:CCM(中央计算模块)、LBCM(左车身控制模块),RBCM(右车身控制模块)和FBCM(前车身控制模块),以及BMS和DI(Driver Inverter)。
其中CCM由IVI(信息娱乐系统)、ADAS/Autopilot(辅助驾驶系统)和车内外通信三部分组成,CCM上运行着x86 Linux系统。LBCM,RBCM和FBCM则负责车身与便利系统、底盘与安全系统以及动力系统的功能,BMS负责电池管理,DI负责电机驱动控制。
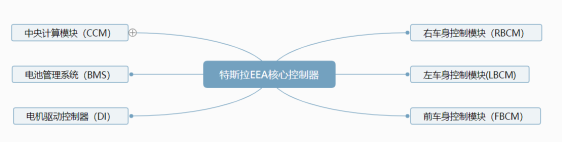
图 1
1.中央计算模块(CCM)
中央计算模块主要包含三大部分:信息娱乐系统,辅助驾驶系统和车内外通信系统。辅助驾驶系统挂载了Private CAN,Vehicle CAN,Chassis CAN三路CAN。该三路CAN也是model 3的骨干网络。其中Private CAN,连接驱动模块、AP,底盘的转向、制动,推测承载车辆最基本、也是最主要的驱动、底盘控制等功能模块信息交互;Vehicle CAN,连接三大车身控制器、高压管理模块以及VSC(Security Controller),主要实现传统车身域功能(负载控制、空调、进入退出)以及高压管理;Chassis CAN,相比来说这一路是最传统的,连接了制动、转向、气囊等。一路Ethernet接入信息娱乐系统,以及用于辅助驾驶系统8个摄像头和一个车内摄像头,这些摄像头完成autopilot的所有视觉处理。具体功能分配如图2-图4所示。
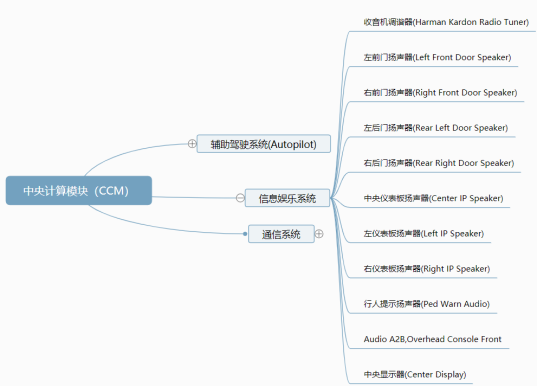
图 2
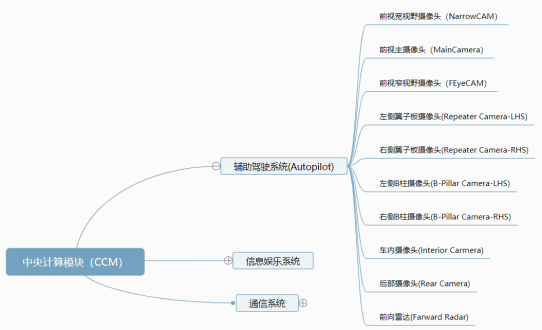
图 3
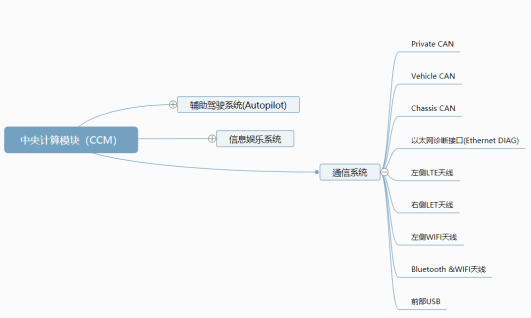
图 4
2. 右车身控制模块(RBCM)
与左车身控制模块相对,通过左右车身模块把功能进行区域划分、对称分配。右车身控制模块主要负责空调,车窗,内外部灯光,驻车,泊车辅助信号采集等功能。空调系统的传感器信号采集、负载驱动几乎都在BCMR中,鼓风机电机驱动分配在BCML中。RBCM相比LBCM多出高位制动灯、位置灯以及左右倒车灯驱动。
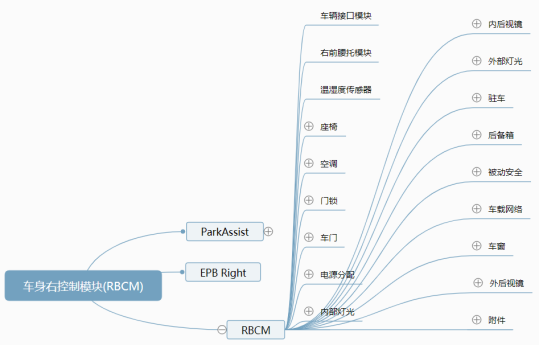
图 5
3. 左车身控制模块(LBCM)
左车身控制模块功能通过与右车身模块进行区域划分,分别实现各自区域的功能,与右车身控制模块涉及到一部分辅助驾驶功能外,左车身控制模块侧重于传统车身域(灯光、座椅、进入灯)。
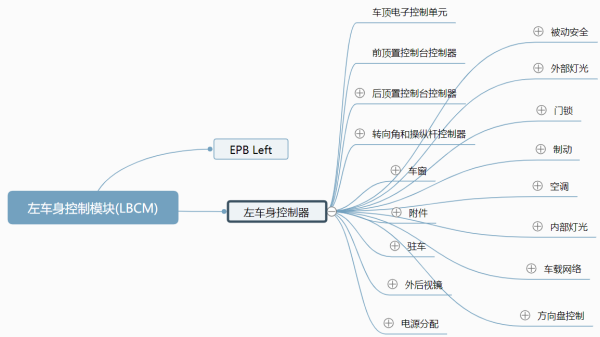
图 6
4. 前车身控制模块
FBCM为主要控制器供电,所有的电源分配都经过FBCM,同时负责低压蓄电池监控以及热管理等功能。

图 7
5. 高压处理单元及电机控制器
对于动力电池部分,包含了电池管理系统、高压处理器、充电口控制器以及能量转换系统,其中,BMS实现了部分传统VCU的功能。电机控制器的接口相对清晰明了:车载网络、旋变信号、定子温度采集以及制动踏板和加速踏板信号采集,实现了传统VCU中踏板信号的采集与处理功能。
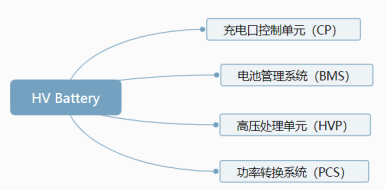
图 8
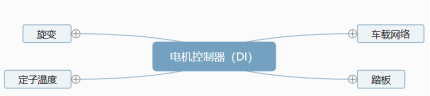
图 9





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















