



前面讲解了HIL系统的组成,那么我们如何才能成功的搭建一个HIL系统呢?
笔者认为搭建一个系统耗费周期最长的就是硬件,因为硬件(包括线束)一旦错误,修改修复的时间太长,将给整个项目的测试和交付带来很大的延迟,这在实际的项目开发中是不允许的。
因此,搭建HIL测试系统要从硬件开始,我们应该整理和匹配现有资源和被测对象资源。各个控制器的功能不一致,下面以控制器的一个功能或者两个功能为例子讲解。
为了明确控制器的功能,我们需要控制器的功能描述文件,控制器的功能一般在CTS(零部件技术规范)和FRD(功能需求文档)进行说明,此外,我们还需要控制器硬件接口定义,通讯协议甚至硬件接口原理图。
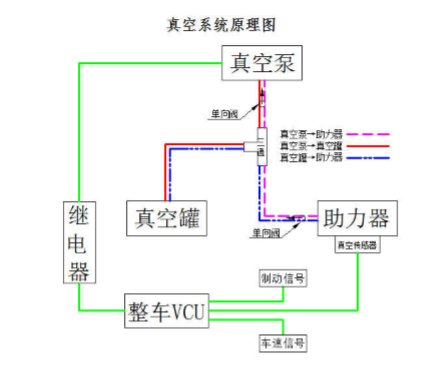
这里我们根据某车厂的真空泵控制功能进行说明。真空泵的控制原理如下:
VCU真空泵控制功能主要是:采集真空压力传感器信号,计算当前制动用气压的大小,控制真空泵启停抽取真空,为驾驶员提供制动助力。具体控制策略这里不再详述,因为控制策略不是本文章讨论的重点。
简言之,VCU需要在整车Ready的状态下,采集制动踏板信号,车速信号,真空传感器信号,并根据这些信号判断是否开启继电器,控制真空泵动作。
那么这里就有了硬线上的输入和输出关系,输入量是制动踏板信号,车速信号,真空传感器信号,输出量是继电器控制IO信号。
了解这些之后,我们就要具体分析这些信号的类型,范围了和芯线定义了。
这里以踏板信号为例,踏板信号一般为模拟信号,信号范围一般为0~5V,对应0~100%,那么我们的硬件就是要模拟该信号,所以我们需要一路DA输出(模拟量输出),同时踏板信号对应控制器连接器的5(+),6(-)芯线(一般为4个,且电压范围不一样,用于冗余,本文主要为了讲解方便)。
根据以上分析我们就可以选择一款DA板卡(一般为多功能板卡),查找他的芯线定义,并根据板卡和控制器芯线定义制作线束。这里笔者将在后面详细进行说明。
同理,其他信号的类型和匹配也可以按照此方法类推,对于信号的类型,板卡和控之气的匹配方法,笔者后续单独在一个章节中进行详细讲解。
至此,控制器的硬件搭建思路基本完成。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















