



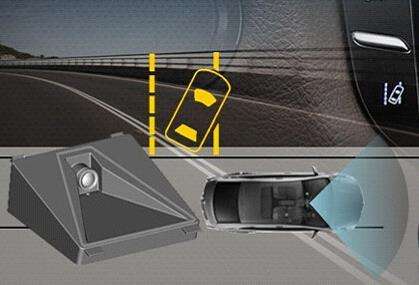
车道偏离预警子系统LDW(Lane Departure Warning),通常由前视摄像头系统实现。系统由摄像头、图像处理模块、MCU控制模块、网络适配模块和图像输出模块(选配)几个部分组成,如下图所示。
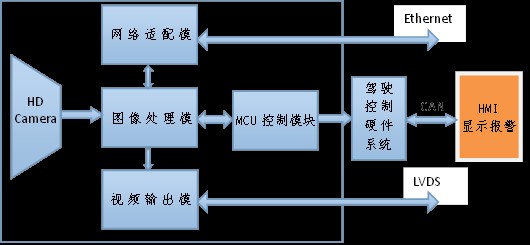
LDW系统框图
LDW功能通过前视摄像头系统检测车道信息及本车在车道的位置信息,使车辆在即将偏出车道线的时候,发出报警提示,提醒驾驶员控制车辆返回车道线中央。当驾驶员无意识情况下(没有提供偏出方向的转向灯等证明驾驶员意图的信息)偏出当前行驶的车道时为驾驶员提供报警提示的系统。当车速低于10kph时系统报警功能通常会关闭,减少对驾驶员的干扰。通过摄像头对车道标线进行识别和检测,准确定位和预测车辆在当前车道线当中的位置,可以检测出当前车与车道线的距离,还可以进一步推断出当前形势状态以及偏出速度和撞线时间等信息,准确预知偏出行为和及时发出警报提供保障。通过先进的图像处理技术识别出多种车道线类型、区分不同车道线颜色,可识别的车道线种类包括:虚线、实现、反光点、双线、马路牙等等;可区分的车道线颜色包括:白色、黄色。还可以检测出车道线距离本车车轮的距离、撞线速度、撞线加速度等信息,从而为控制算法提供准确的信息。车道线偏离预警功能可以发出多种报警提示,包括:声音报警、视觉提示、触感预警等。智能驾驶摄像头系统应可以保证在白天、黄昏、夜间等不同光照条件下稳定工作。下图是系统对车道线识别的结果展示。
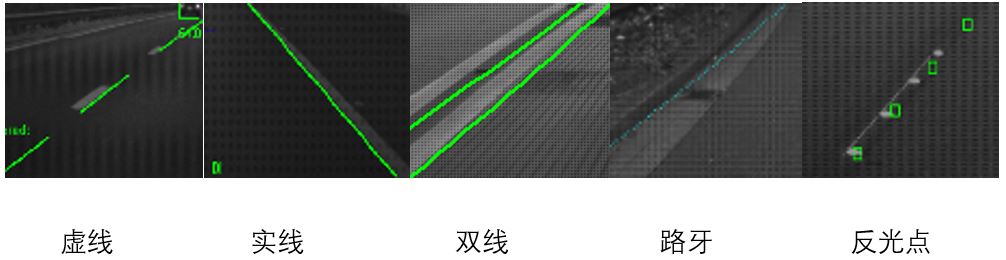

LDW系统识别效果图
LDW系统基本功能元素如下图所示,关键功能包括:状态提示、横向位置探测、车道偏离报警及系统状态检测策略和报警。报警抑制、车速测量、驾驶员偏好和其他功能属于可选功能范畴。
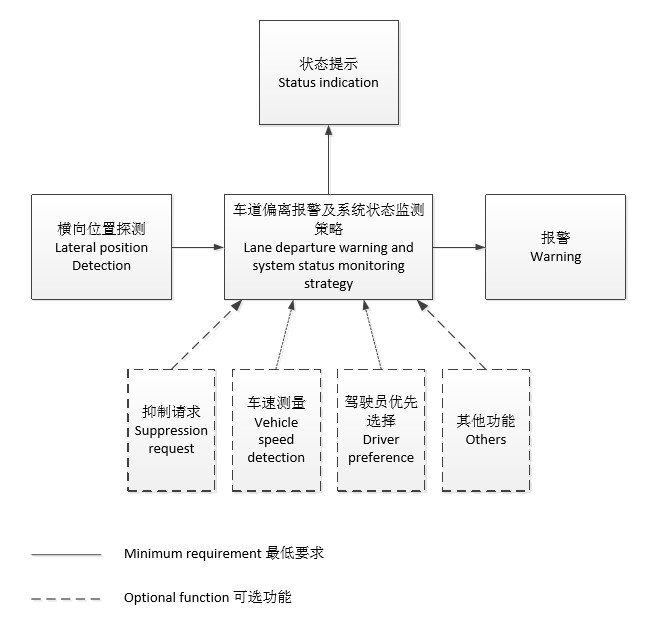
基本功能示意图(ISO 17361)
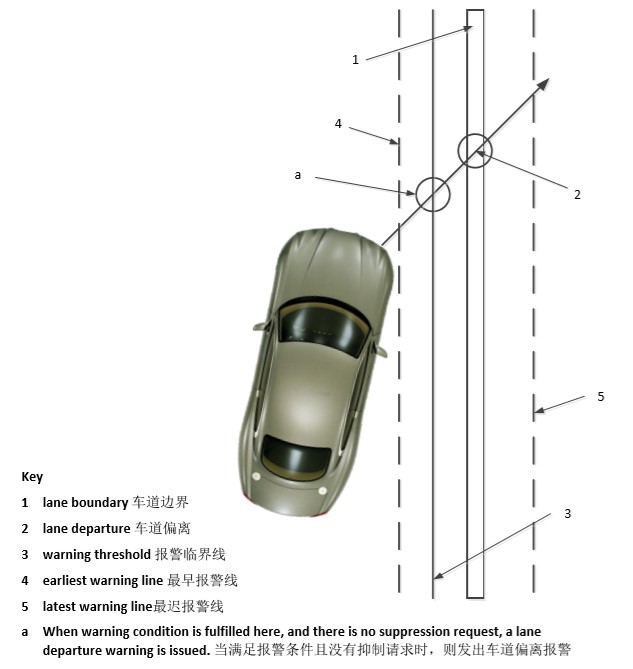
警触发示意图(ISO 17361)
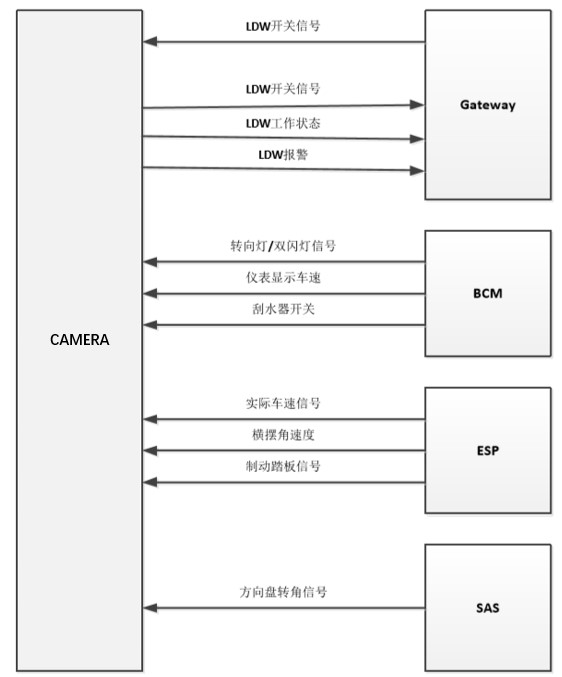
LDW信号接口示意图
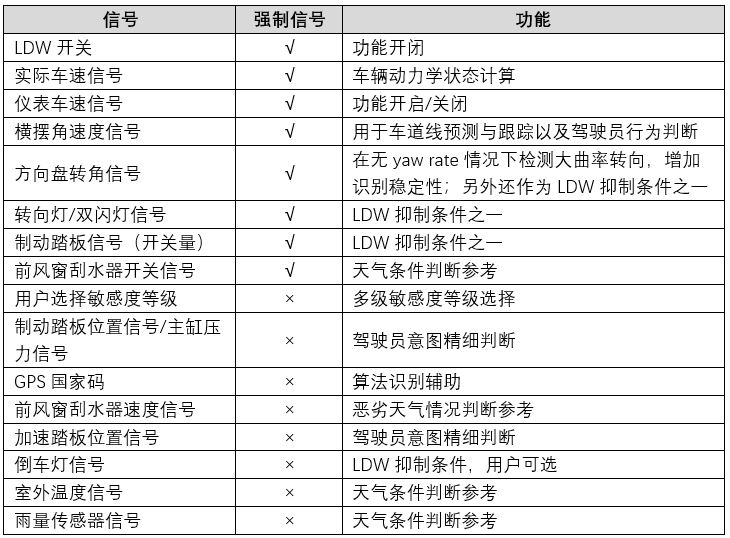
LDW系统输入信号列表:
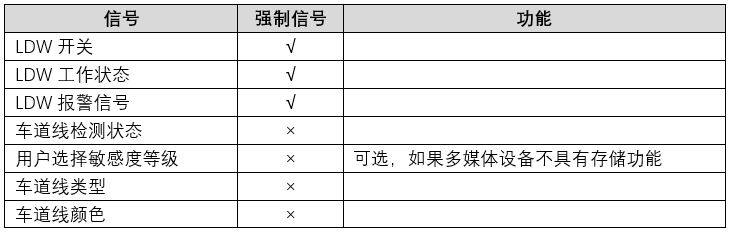
LDW系统输出信号列表:
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















