



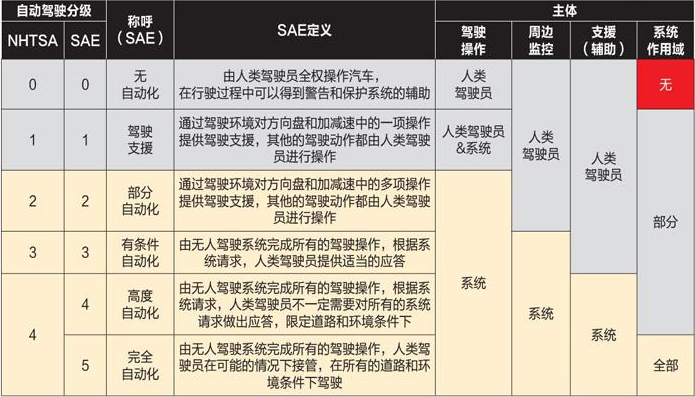
自动驾驶分为6个等级L0~L5
L0:车辆完全由驾驶员掌控,驾驶员拥有绝对控制权,且车上不存在任何的自动驾驶技术。
L1:驾驶员依然需要去驾驶车辆,只不过出现了像ACC自适应巡航等安全系统,对驾驶员的驾驶起到一个辅助的作用,手不得离开方向盘,眼不得离开周围路况。
L2:来到L2这个级别,自动驾驶技术就可短暂接管一些驾驶任务,眼和手可短暂获得休息,但是仍需做好随时接管驾驶任务的准备,时刻准备着,因为还不足以应对变化的交通路况。
L3:来到L3这个级别,在某种意义上就可以算作自动驾驶,也可以把这个级别称为真正自动驾驶的开端。驾驶员可以将手离开方向盘,脚离开踏板,车辆几乎可以独立完成全部的驾驶操作。理论上可以刷刷微博玩玩手机啥的,但驾驶员还是要有意识的去随时接管驾驶任务。
L4:第4等级可以说是真正意义上的自动驾驶,不需要驾驶员随时接管,也不需要驾驶员的干预,你只需要坐在驾驶席上做自己想做的事,剩下的一切交给技术就好了。
L5:这是自动驾驶的终极目标——无人驾驶。
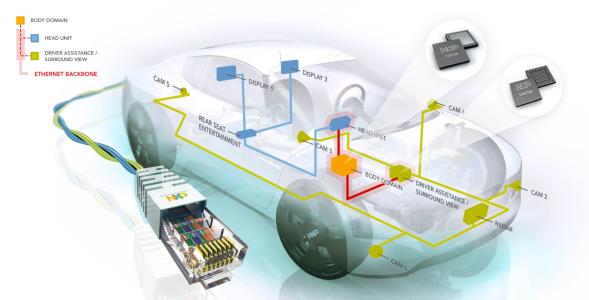
随着自动驾驶慢慢的实现,目前采用域控制器按,激光雷达,Autosar,以太骨干网作为标配。以太骨干网既是核心,也是其他三者存在的基础。
车载以太网最重要的应用就是域控制器。
域控制器加AUTOSAR,不仅可以共享硬件软件通讯资源,还可以大幅度提高软件集成度,提高基础软件的可复用性,厂家只需要关注应用层软件即可。
为什么要在车上用以太网呢?除了域控制器,激光雷达,这些需要带宽和全新运算架构,还有一个就是降低成本的需求。
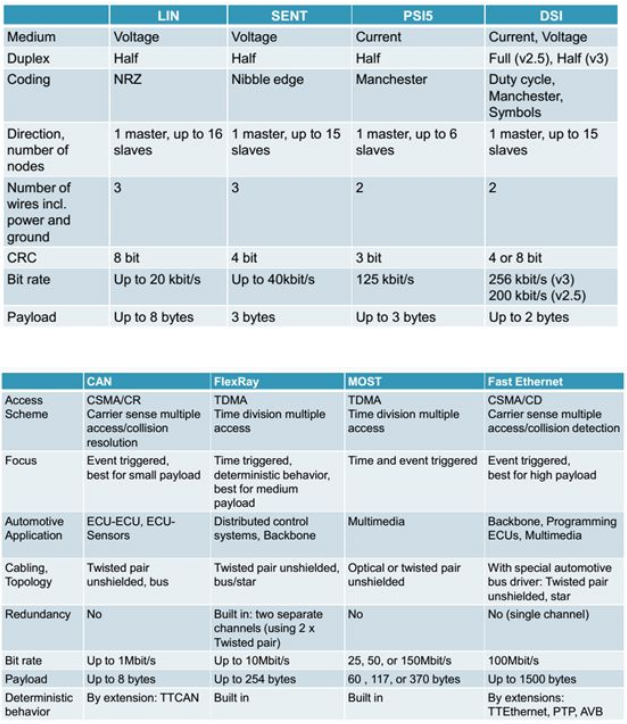
目前车内常见的总线包括LIN(车身领域)、CAN、PSI5(主要是气囊)、CAN-FD(高速CAN)、MOST(大众汽车的信息娱乐系统)、Flexray(德系豪华车的底盘系统与辅助驾驶系统)、FPDLINK(360全景系统)。2010年后汽车电子爆发,ECU数量,ECU的运算能力需求都呈现爆发式增长,在ADAS时代和即将到来的无人驾驶时代讲更加明显,同时对运算带宽的需求也开始爆发。这造成汽车电子系统成本大增,一方面是ECU系统数量和质量的增加,由于是分布式计算,大量的运算资源被浪费了,由此产生的成本增加大约300-500美元,如果沿用目前的电子架构体系,产生的成本增加最少也是1000美元。
另一方面是线束系统。一辆低端车的线束系统成本只要大约300美元,重量大约30公斤,长度大约1500米,线束大约600根,1200个接点。而目前一辆豪华车的线束系统成本大约550-650美元,重量大约60公斤,线束大约1500根,长度大约5000米,3000个接点。如果沿用目前的电子架构体系,无人车时代的线束成本不会低于1000美元,重量可达100公斤。车载以太网使用单对非屏蔽电缆以及更小型紧凑的连接器,使用非屏蔽双绞线时可支持15m的传输距离(对于屏蔽双绞线可支持40m),这种优化处理使车载以太网可满足车载EMC要求。可减少高达80%的车内连接成本和高达30%的车内布线重量。100M车载以太网的PHY采用了1G以太网的技术,可通过使用回声抵消在单线对上实现双向通信。
当然,对带宽的需求也是一个因素,各种传感器,特别是激光雷达和高分辨率摄像头,必须用以太网传输数据。
为什么车载网络不能使用传统的以太网呢?
以太网的发明时间太早,并没有考虑实时信息的传输问题。尽管RTP(Realtime Transport Protocol)能在一定程度上保证实时数据的传输,但并不能为按顺序传送数据包提供可靠的传送机制。因此,想要对所有的数据包进行排序,就离不开对数据的缓冲(Buffer)。但一旦采用缓冲的机制就又会带来新的问题—极大的“延时”。换句话说,当数据包在以太网中传输的时候从不考虑延时、排序和可靠交付。传统以太网最大的缺点是不确定性或者说非实时性,由于Ethernet采用CSMA/CD方式,网络负荷较大时,网络传输的不确定性不能满足工业控制的实时要求,故传统以太网技术难以满足控制系统要求准确定时通信的实时性要求,一直被视为“非确定性”的网络。尽管传统二层网络已经引入了优先级(Priority)机制,三层网络也已内置了服务质量(QoS)机制,仍然无法满足实时性数据的传输。此外,在传统以太网中,只有当现有的包都处理完后才会处理新到的包,即使是在Gbit/s的速率下也需要几百微秒的延迟,满足不了车内应用的需求。更何况目前是Mbit/s的速率,延迟最多可能达上百毫秒,这肯定是无法接受的。
普通以太网采用的是事件触发传输模式,在该模式下端系统可以随时访问网络,对于端系统的服务也是先到先服务。事件触发模式的一个明显的缺点是当几个端系统需要在同一传输媒介上进行数据通讯时,所产生的传输时延和时间抖动会累积。
以太网默认的转发机制叫做“BestEffort”(尽力而为)。也就是说当数据包抵达端口后,本着先入先出的原则转发。当网络的流量稀疏,这本不是一个问题。但在实际环境中,大量的数据包极有可能在一瞬间抵达端口。当然,端口可以在一定程度上缓存并延时转发,但我们一方面是不能容忍过大的延时转发,另一方面交换机的物理端口缓存也非常小,不可能有效解决大量数据包瞬间抵达的问题。音视频流恰好是沿等长的时间间隔发布数据的。比如说:一个24比特48K采样的专业音频通道,每个采样的时间间隔是20.83 µs。如果我们按照每6个采样封装成一个数据包,那么每个数据包的固定间隔就是125 µs。每个数据包是由两个部分组成,数据报头(74字节)+音频通道采样数据(24字节X通道数)。如果用传统以太网传输,肯定会出现丢包,在网络本身架构没法改变的情况下,只能修改数据结构。将几个不同的音频流进行流量整形(Traffic shaping),流量整形而不是流量控制(TrafficControl),经过流量整形每个流所占的带宽会在同一个时间节点。所有的非实时流可以见缝插针提高对带宽的占用率。
国际电子电气工程师协会(IEEE)经过长期研究在2016年批准了第一个车载以太网标准 “100BASE-T1”,其基于博通公司的BroadR.Reach 解决方案,在物理层用单对非屏蔽双绞线电缆,采用更加优化的扰码算法来减弱信号相关性增加实时性,可在车内提供100Mbps高实时带宽。
所以说车载以太网是为自动驾驶而生的。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















